
Hi, I am a research assistant in MARS Lab at IIIS, Tsinghua University, working with Prof. Hang Zhao. My research interests lie at the intersection of artificial intelligence and computer vision, with a particular focus on generative models, autonomous driving, and multi-modal machine learning.
I was an intern at Xiaomi EV, working with Dr. Guang Li and Dr. Kuiyuan Yang, and during which I secured 2nd place in the Mapless Driving track of the CVPR2024 Autonomous Grand Challenge.
I earned my MEng (2024) from Beijing University of Posts and Telecommunications (BUPT) and my BEng (2021) with a UK First Class Honours Degree from the joint program between BUPT and Queen Mary University of London (QMUL). I am fortunate to have received recommendation letters from Dr. Kuiyuan Yang and Pres. Kun XU of BUPT.
![]() I’m actively on the hunt for a PhD opportunity. Should you come across any promising leads, I’d be delighted to hear from you. My CV, research statement and research proposal are available.
I’m actively on the hunt for a PhD opportunity. Should you come across any promising leads, I’d be delighted to hear from you. My CV, research statement and research proposal are available.
Research
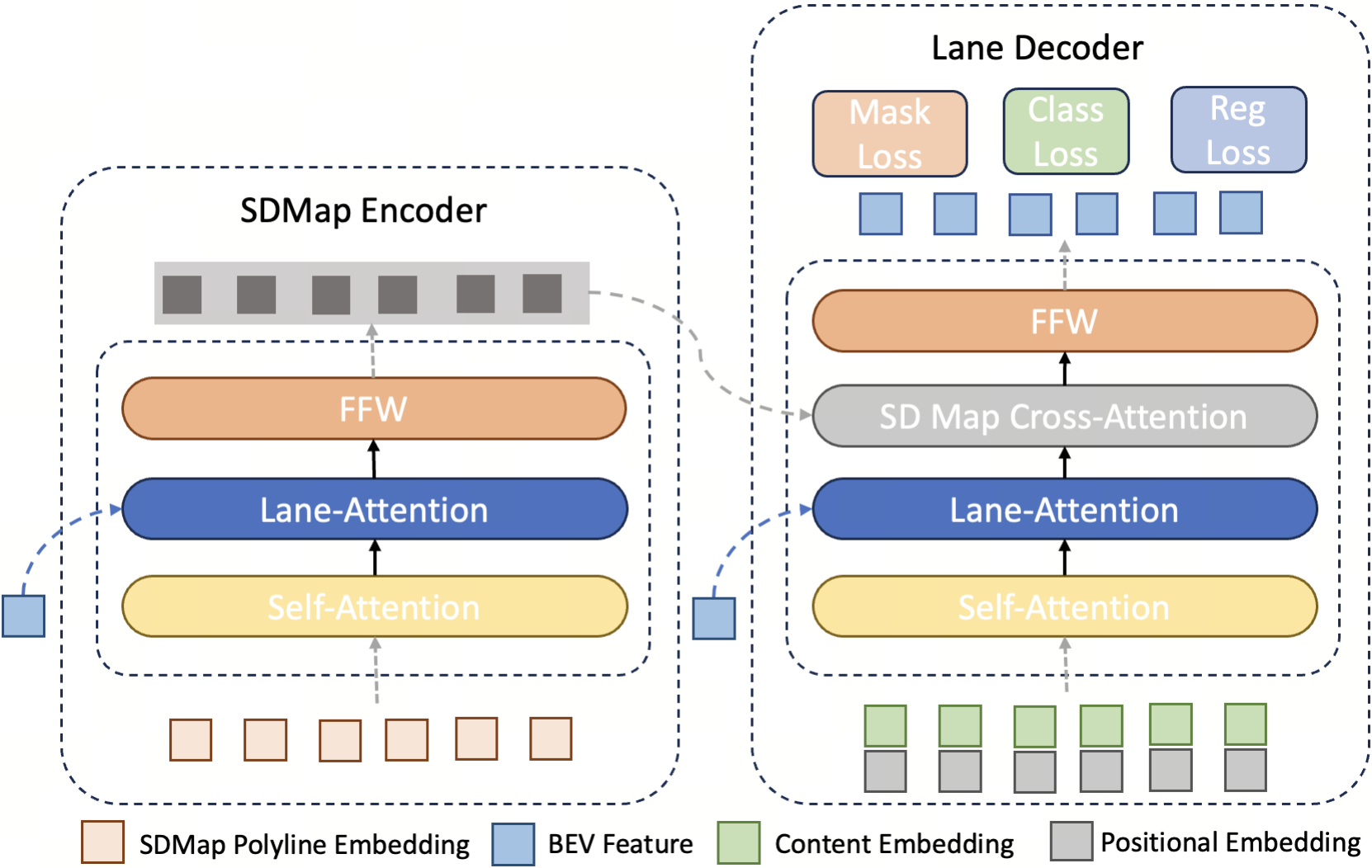
Leveraging SD Map to Assist the OpenLane Topology
Guang Li*, Jianwei Ren*, Quanyun Zhou, Anbin Xiong, Kuiyuan Yang
CVPR Workshop, 2024
This is a technical report for Mapless Driving, achieving 2nd place on the OpenLane-V2 leaderboard. A "lane-crosswalk-boundary" joint training framework is adopted to detect vectorized traffic elements, demonstrating that employing appropriate representations for traffic elements and incorporating SD map into BEV generation significantly enhance performance. Additionally, a YOLOv8-based multi-scale framework is employed for detecting traffic signs. We also introduce geometric priors to refine topological modeling, achieving state-of-the-art results.
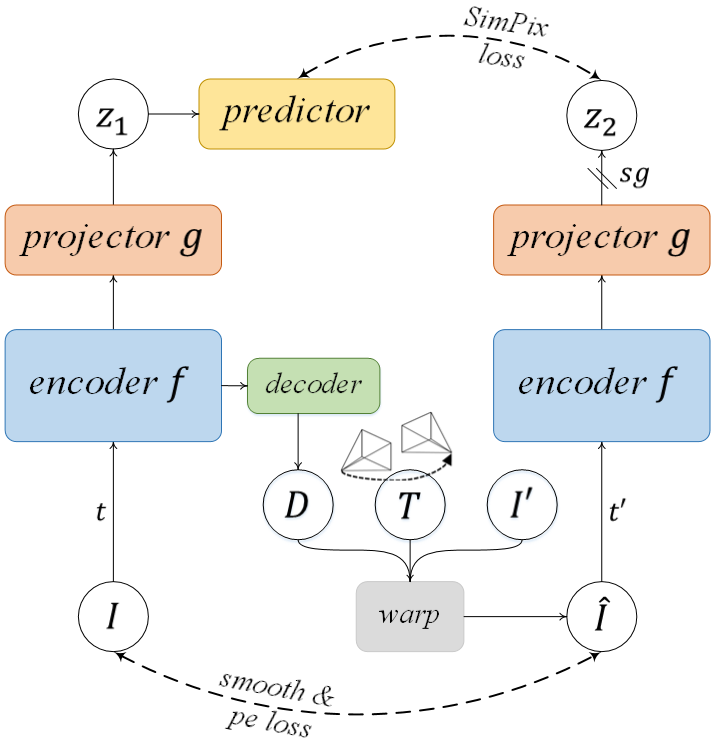
SimPix: Simple Pixel-wise Representation Alignment for Self-supervised Monocular Depth Estimation
Jianwei Ren
One Chapter of Master Thesis
This is a simple pixel-wise representation learning framework for self-supervised monocular depth estimation. It explicitly constructs a knowledge transfer path between the original frame and reconstructed frame, enabling its siamese weight-sharing encoders to extract scene-invariant features. SimPix achieves competitive results with state-of-the-art without increasing the complexity during inference.
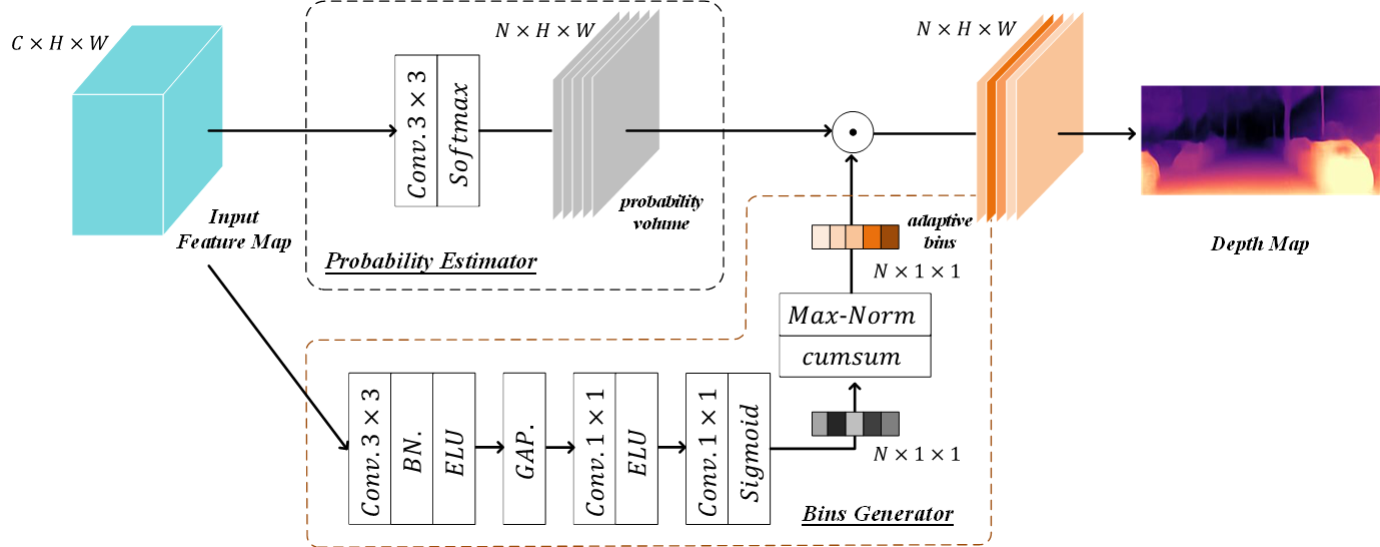
Adaptive Discrete Disparity Volume for Self-supervised Monocular Depth Estimation
Jianwei Ren
ArXiv, 2024
This is the first work to introduce adaptive discrete strategy into the self-supervised monocular depth estimation community. Through global perception of distinct scenes, a learnable module is designed to dynamically allocate pixels into bins with adaptive depth values. To prevent collapse due to the absence of supervision, a regularization is proposed to encourage a uniform distribution of samples overall. Empirical results underscore that adaptive methods retain superiority to conventional handcrafted strategies even without supervision.